








The specialist of small precision motors - ORIENTAL MOTOR (MALAYSIA) > Technical Support > Technical Question 9
|
|||
Mr. Vex:Miss Ori, i have received a query from a customer who is a first time user stepping motor. He is asking about the usage of excitation timing signal. I understand that using excitation timing signal when returning to home position improves its accuracy. But i dont know how to answer the question of " how to use".
Miss Ori: Firstly, do you understand the working principle of homing operation?
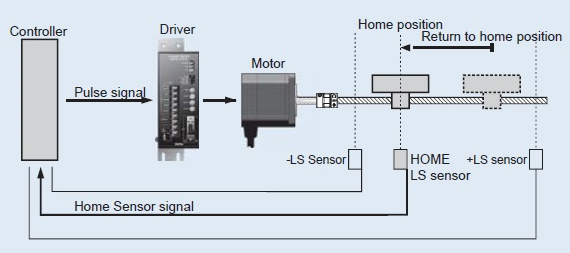
Mr. Vex: Yes i do. In positioning, home position is important. To determine home position, external proximity sensors or photosensors etc; must be installed. Once home position sensor detects the position, pulse signal cease and stepping motor stops. That is the working principle of homing operation. Is it right?
Miss Ori: That's right. However, are you aware that the detection range of proximity sensor varies easily; as it is affected by surrounding temperature, humidity, dust etc. variation in detection range of sensor causes variation in motor position when pulse singal stops. The accuracy of the final position is affected by the accuracy of home positioning.f the gear head with reduction ratio 1:3 is used in induction motor, it's gear head is output shaft overrun will be 10~13 revolutions.
Even in the case of a photo sensor, the stopping accuracy will be affected by response time of the sensor used. To conclude, although homing accuracy depends on the sensor, there is still possible risk of variations for a stop position when one sensor (proximity/photo sensor) is used.
Mr. Vex: Consequently, this is where the excitation timing signal output comes in.
Miss. Ori: It differs from by motor type too. The overrun of the induction motor without load moment of inertia will be about 30~40 revolutions.
Mr. Vex: Overrun varies by the motor type?
Miss. Ori: Yes, reversible motor has approximately 5-6 revolutions for the over run.
Mr. Vex:Why does the reversible motor has smaller overrun than the induction motors.
Miss. Ori: Exactly!!!
Mr. Vex:Because the reversible motor has a built-in simple brake system, which enhances instant switching of rotating direction. That's is why it has smaller over turn compared to the induction motor.
Miss. Ori:Precisely Mr Vex, can you explain the theory behind the excitation timing signal output?
Mr. Vex:Uh..isn't the excitation timing signal output when the stepping motor reaches the initial excitation state. When using a 5 phase stepping motor at full step (0.72° ), output at every 10 pulses , 7.2° rotation.
Miss. Ori:When stepping motor is switched on, motor winding is excited and there will be holding torque. This is called initial excitation. It indicates that the excitation signal sequence is initialized, which is a function of the driver. it is output every 7.2. For 5 phase stepping motors, it is output every 10 pulses(for full step) or 20 pulses( for half step).
Now for the method of using excitation timing signal. By configuring an AND circuit using the home sensor and excitation timing signal output, variance in the stopping position of the motor inside the home sensor detection range is reduced. therefore a more accurate home position is detected. 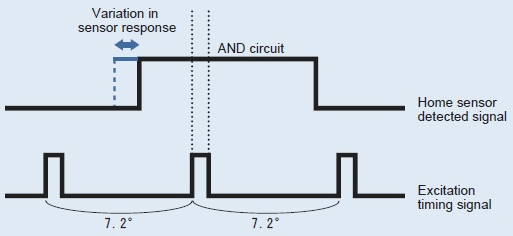
Mr. Vex:That means accurate home position can be achieved even if there is variation by sensor response, using both signals detected by home position sensor and excitation timing signal output.
Miss. Ori: Most of the oriental motor stepping motor drivers have the features of excitation timing output signa
Mr. Vex:Understood. I will explain this immediately to the customer
|

