Small Robots OVR
6-Axis Articulated Robot

- Capable of Approaching the Load From Any Angle
- Body Mass 12.5 kg
- Maximum Reach (Horizontal) 480 mm, Payload 1 kg
- Drive Motor: AZ Series with battery-free built-in absolute encoder (DC input)
Features | 6-Axis Articulated Robot
- Compact and Lightweight Design
- Rotation and Bending of the Wrist Axis to Approach From Various Angles
- User Maintenance is Possible
- Easy-to-Control Robot Controller
- Using AZ Series With Battery-Free Built-In Absolute Encoder
- Useful Tools Before Installing Robots
- Product Details Information
- Easy Introduction of Robots Into Existing Systems
- Related Products
Compact and Lightweight Design

The main unit weighs only 12.5 kg and requires 130 x 130 mm installation space.
Flexible support for installation on the line and layout changes due to the ease of transport and installation.
Since it is powered by a 24 VDC power supply, it can be mounted on a transport robot if a battery-compatible driver is used.
Rotation and Bending of the Wrist Axis to Approach From Various Angles
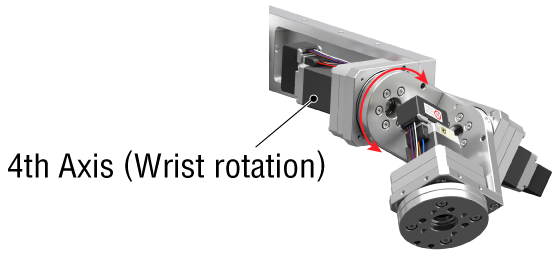
A motor for wrist rotation is added to the 4th axis for 5-axis articulated robots.
This allows the wrist axis to be rotated and bent to approach from various angles.
Capable of transferring at different angles of load, horizontal transfer of load in front of the robot, etc.
User Maintenance is Possible

Motors for each axis and electric actuators can be replaced by the customer. Reduces the maintenance load (cost and time) after installation.
- *We will also replace the motors during maintenance and servicing. Please contact your nearest Oriental Motor branch or sales office.
Easy-to-Control Robot Controller

MRC01 is a robot controller that can control robots equipped with the AZ Series.
The programming software MRC Studio (free of charge) is so simple that even those inexperienced in controlling robots can master it quickly.

The lineup also includes integrated robot controller & drivers that integrate MRC01 and the drivers.
It lowers the control hurdles in robot installation and contributes to shorter start-up time.
Click here for details on the MRCU Series integrated robot controller & drivers
- Note: When using the robot, please consider its safety as an industrial robot. (Cannot be used as a collaborative robot)
Using AZ Series With Battery-Free Built-In Absolute Encoder
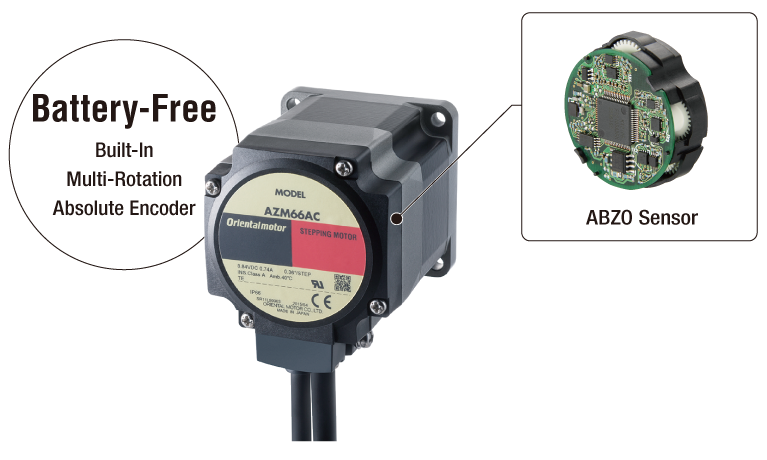
All axes use the αSTEP AZ Series (DC input).
Absolute mode eliminates the need for external sensors, reduces wiring, and reduces maintenance by eliminating the need for battery management.
DC input allows easy power line routing. Installation and layout changes to the line can be adapted to flexibly.
Useful Tools Before Installing Robots
MRC Studio Simulator

This software (free of charge) enables simulation of actual movements on a PC at the stage of considering the introduction of a robot, without the robot itself or MRC01.
Click here for detailsMRC Reality

Virtual robots can be set up in real space to simulate operations.
Apps are available for smartphones/tablets and for head-mounted displays (Meta Quest 3).
Product Details Information
For detailed product information such as specifications, characteristics, dimensions, CAD, operating manuals, etc., click on the product name link below.
Easy Introduction of Robots Into Existing Systems
The MRC Series links to the host controller using EtherNet/IP™ for direct control.The Small Robots OVR or in-house robots can be easily added to existing equipment without making significant changes to the control system.Programming software MRC Studio (free) can be used to program the robot.The Small Robots OVR has pre-input mechanism information, making it easier to perform the initial settings.
- *EtherNet/IP™ is a trademark of ODVA.

Configuration Price Example
| Product Name | Quantity | List Price (CIF) | Subtotal | |
|---|---|---|---|---|
| Robot | OVR6048K1-V | 1 | RM 61,937 | RM 61,937 |
| Integrated Robot Controller & Drivers | MRCU6AK | 1 | RM 23,160 | RM 23,160 |
| Cable Between Motor and Driver (3 m) | CCM030Z1EFF | 1 | RM 445 | RM 445 |
| CCM030Z1EFR | 2 | RM 690 | RM 1,380 | |
| CCM030Z2AAR | 3 | RM 572 | RM 1,716 | |
| Power Supply Cable | CC09MRCU030 | 1 | RM 1,463 | RM 1,463 |
| Total RM 90,101 | ||||
- ・The MRCU Series can also be operated with an I/O connection (without a host controller).
- ・Additionally, a DC power supply and end effector are required.
- ・Refer to the tool for Product Name of Cable required to drive.
Related Products
Educational Robot Motion System Master
This is a set of teaching robotics materials for technical high schools, higher education institutions, and manufacturing industry workers to learn the elements of industrial robots in terms of machinery and software.
This product can be easily used by those who are just starting robot education and learning, as it reduces the introduction cost of robot education and does not require special training.

- Inexpensive 3-axis small tabletop robot to start teaching and learning robotics
- Structural learning and easy programming using command icons
- Installation area φ16 cm, body mass 4.2 kg
- Maximum reach length (Horizontal) 390 mm*, payload 1 kg, repetitive positioning accuracy ±0.1 mm
- *Arm lengths are customizable