What is the difference between a stepper motor and a servo motor, and which has a larger permissible inertia?

In this column, we will introduce the differences in use between stepper motors and servo motors, using examples of cases where mechanisms with load fluctuations and loads with large load inertia moments are handled.
What is gain adjustment?
Usage by mechanism
-

I think it would be difficult to adjust gain for an elevator with variable load mass, or a mechanism with load fluctuation like a crank mechanism or cam mechanism. The advantage of stepper motors is that they can achieve high responsiveness without the need of gain adjustment, regardless of the mechanism, so I think it's a good idea to suggest them according to the customer's mechanism.
Crank mechanism 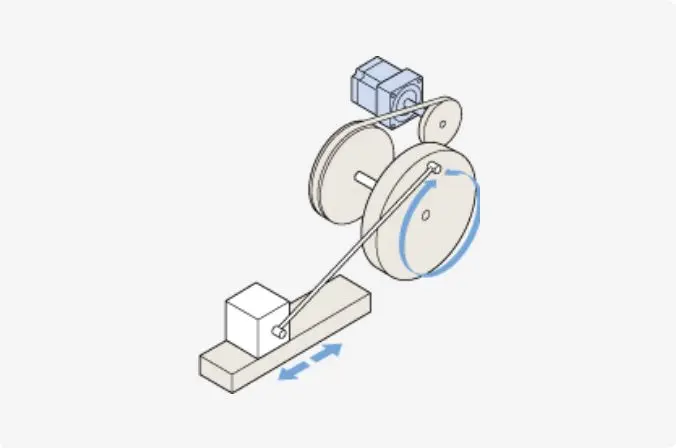
Cam mechanism 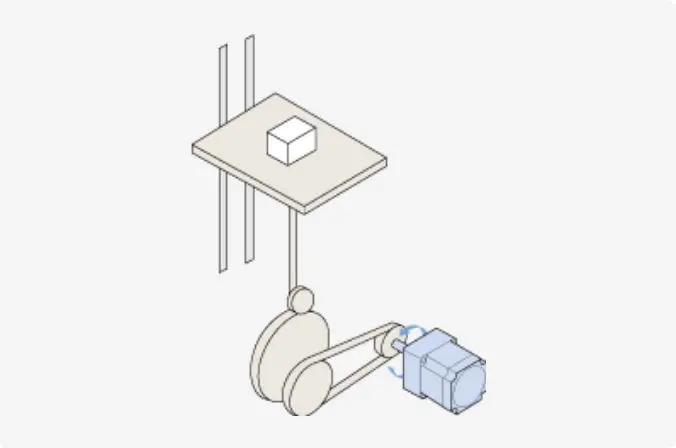
-

-
-
Usage by load
Permissible inertia value comparison
| Frame Size | Servo motor* | αSTEP | ||||
|---|---|---|---|---|---|---|
| Product Lineup [Output] |
Rotor Inertia Moment [x10-4 kg·m2] |
Permissible Inertia Moment [x10-4 kg·m2] |
Product Lineup [Servo Equivalent Type] |
Rotor Inertia Moment [x10-4 kg·m2] |
Permissible Inertia Moment [x10-4 kg·m2] |
|
| □42 mm | 50 W | 0.0174 | 0.87 | AZM46 | 0.055 | 1.65 |
| 100 W | 0.029 | 1.45 | AZM48 | 0.115 | 3.45 | |
| □60 mm | 200 W | 0.162 | 8.1 | AZM66 | 0.37 | 11.1 |
| 400 W | 0.291 | 14.55 | AZM69 | 0.74 | 22.2 | |
| □85 mm | 750 W | 0.948 | 47.4 | AZM911 | 2.2 | 66 |
*The servo motor values are reference values when our products are automatically tuned
Key Points of this Time
What is gain adjustment?
This is an adjustment for optimal control according to the load. The responsiveness and stability of servo motors are strongly affected by the size of the load inertia and its changes, as well as the mechanical rigidity of the device itself, so gain adjustment is necessary for devices with low mechanical rigidity or large inertial loads.
Use of stepper motors and servo motors
Stepper motors may be more suitable for cases with load fluctuations such as elevators, crank mechanisms, and cam mechanisms, where the load mass fluctuates, or when the load inertia is large.